计算机模拟显示行走时使用的肌肉控制策略的有效性
任何在城市中行走的人都不得不一次又一次地调整步态以在路边或台阶上行走。每个人都制定了控制策略来控制肌肉活动所需的变化,从而保护他们免受绊倒和跌倒事故的影响。拜罗伊特大学的研究人员现在已经使用计算机模拟分析了这些策略及其有效性。他们能够证明,基于视觉感知的策略,在早期阶段为肌肉的身高差异做好准备,比情境肌肉反射更好地保护。他们的研究发表在《科学报告》中。
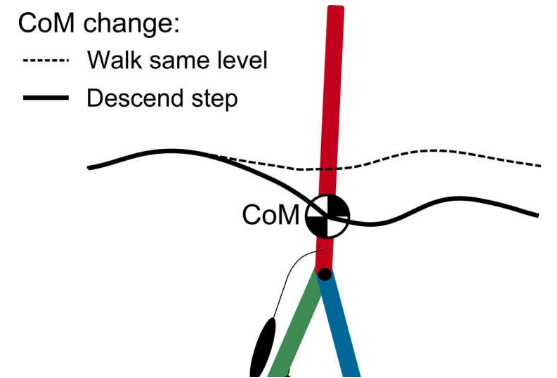
如果提前感知到路缘石、台阶或其他地面高度差异,肌肉可以相应地进行调整。膝、踝关节更加弯曲,身体重心高度发生变化。这种预期的肌肉适应在研究中被称为预期控制策略或“高级策略”。另一种要求不高的“低级策略”完全基于肌肉反射。这些反射只有在步行过程中从路边或楼梯踏出一步时才会触发,并且绊倒和跌倒的风险迫在眉睫。
“在我们的研究中,我们试图发现这些不同策略对步态行为的影响以及它们对于安全克服身高差异的重要性。然而,问题出现了,我们永远无法像人类一样完全关闭这两种控制策略中的任何一种。因此,很难确定单一策略对选定的测试对象的影响。但是,通过计算机模拟,这样的分析是可能的,”该研究的负责人 PD Roy Müller 博士解释说,他是运动科学主席的研究助理在拜罗伊特大学和 Klinikum Bayreuth GmbH-Medizincampus Oberfranken 步态实验室负责人。
研究人员将他们的计算机模拟建立在一个神经肌肉模型上,其中肌肉只受到反射的刺激。使用此模型,可以单独显示低级策略的效果。事实证明,只有在高度差不超过 3 厘米的情况下,这种策略才能保证步行到突然降低的表面的有效、预防事故的适应。然而,路缘石通常有 5 到 12 厘米高。显然,仅基于反射的控制策略不足以避免跌倒。
因此,作为研究的一部分,在该模型中添加了额外的预期策略。计算机模拟现在显示出显着的好处。高低相结合的策略保证了3到21厘米的高度差可以在没有事故的情况下进行管理。“这一结果清楚地强调了预期适应在日常生活中的重要性。它证明,由于视力下降或神经元疾病而只能在有限程度上做出这些调整的人跌倒的风险要高得多,”穆勒说。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【关于鱼肉粥的做法】鱼肉粥是一道营养丰富、口感细腻的家常美食,尤其适合老人、小孩和病后恢复期的人群食用...浏览全文>>
-
【关于鱼的唯美网名精选关于鱼的唯美网名】在互联网文化中,网名不仅是个人身份的象征,更是个性与情感的表达...浏览全文>>
-
【关于鱼的诗句】在中国古典诗词中,鱼是一个常见的意象,常被用来寄托情感、表达哲理或描绘自然之美。无论是...浏览全文>>
-
【关于鱼的名言警句有哪些】鱼,自古以来便是人们生活中不可或缺的一部分,不仅在食物中占据重要地位,也在文...浏览全文>>
-
【关于鱼的励志句子分享】在自然界中,鱼是一种充满生命力和智慧的生物。它们在水中自由游弋,面对风雨与暗流...浏览全文>>
-
【关于鱼的记忆只有7秒介绍】“鱼的记忆只有7秒”这一说法在日常生活中广为流传,许多人认为鱼类的短期记忆非...浏览全文>>
-
【关于鱼的记忆经典感人句子】在文学与影视作品中,“鱼”常常被赋予象征意义,它既可以代表自由、生命,也可...浏览全文>>
-
【关于养花的心情说说女人养花的心情语录】养花,是一种生活态度,也是一种内心的表达。对于许多女性来说,养...浏览全文>>
-
【关于养成的游戏】“关于养成的游戏”这一主题涵盖了多种类型的游戏,它们的核心玩法通常围绕角色、物品或系...浏览全文>>
-
【关于洋槐花蜂蜜的介绍】洋槐花蜂蜜,又称刺槐蜜,是一种由蜜蜂采集洋槐花花蜜后酿制而成的天然蜂蜜。它色泽...浏览全文>>