Meta AI、斯坦福大学、Technische、德累斯顿大学和德国癌症研究中心 (DFKZ) 的研究人员最近开发了 DIGIT Pinki,这是一种可以检测触觉信息的微型传感器。该传感器在预印本服务器arXiv上发布的一篇论文中介绍,可以集成到新的医疗技术和机器人系统中。
“这篇论文始于与 Roberto Calandra 和 Mike Lambeta 在 Meta AI 的研究实习,但最终发展成为 Meta、斯坦福大学、德累斯顿工业大学和德国癌症研究中心 (DFKZ) 之间的研究合作,”Julia Di 博士说-该论文的作者告诉 Tech Xplore。
“我们主要对机器人数字化触摸科学感兴趣。通过 DIGIT Pinki,我们希望研究如何构建具有与人类相似的触摸功能但具有人类手指形状因素的传感器。”
Di 和她的同事创建的 DIGIT Pinki 传感器基于近年来推出的触觉传感器设计,例如 DIGIT 和 OmniTact 传感器。然而,为了创造他们的设备,Di 和她的同事还重新审视了 20 世纪 80 年代引入的旧设计理念,包括S. Begej 的一篇开创性论文中概述的设计理念。
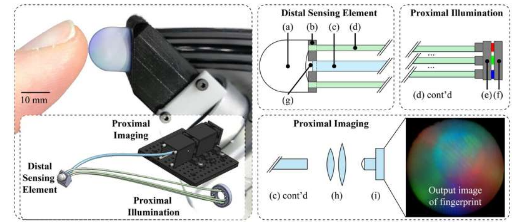
“DIGIT Pinki 是一种基于视觉的触觉传感器,它使用微型相机的图像来获得触觉,”Di 解释道。 “通常,这类传感器由光学透明的凝胶指尖组成。当这些凝胶指尖接触物体或环境时,带有灯光的内部摄像头将拍摄凝胶中由此产生的变形的图像。”
研究人员根据传感器凝胶变形来训练机器学习算法,这种变形是传感器与物体接触时产生的。经过训练的算法可以从传感器收集的图像数据中准确地学习触觉信息,例如与物体的接触力。然后,机器人或设备可以使用这种触觉信息来完成操作任务。
标签:
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!