大邱庆北科学技术学院机器人与机电一体化工程系的 Sang-hoon Lee 教授领导的研究小组成功开发了一种潜意识表面肌电 (sEMG) 传感器。该传感器对于让下肢截肢者能够按照自己的意愿控制机器人假肢至关重要,预计将为康复和提高生活质量做出巨大贡献。
近年来,随着糖尿病等生活方式疾病的增加,下肢截肢者的数量迅速增加。下肢截肢带来的永久性影响不仅是身体残疾还有心理残疾。为了解决这个问题,近年来发展了仿生下肢技术,用机器人假肢替代失去的腿。
开发机器人假肢最重要的是稳定地实现截肢者想要的下肢功能,并为了因此,能够快速、准确地获取截肢者的信息需要生物信号。最合适的方法是使用非侵入式表面肌电传感器;然而,这些传感器在实际中很难使用。
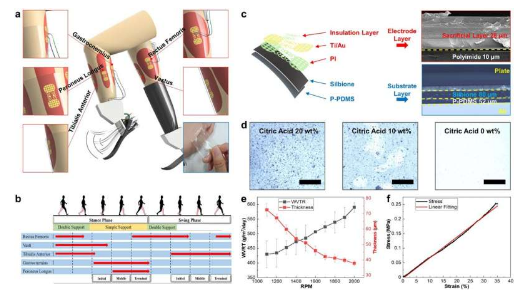
传感器必须位于插座的硅胶衬里内才能记录肌电信号。然而,硅胶衬垫非常狭窄,会产生潮湿的环境,并且会受到接受腔的影响,由于机器人假腿的重量,接受腔会受到强烈的动态运动。这使得不可能稳定地记录肌肉的变化。长时间接收生物信号而不损坏传感器本身。
在此背景下,DGIST Sang-hoon Lee 教授领导的研究团队开发了一种无感知 sEMG 传感器,这是一种通过微机电系统形成的生物界面。该研究已发表在期刊npj Flexible Electronics上。
标签:
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!