磁性微型旋转机器人可进行超精密表面抛光和清洁
一个研究小组公布了一项创新技术,利用同时运行的磁性微型旋转机器人进行超精密表面抛光和清洁。这些微型机器人能够去除和抛光纳米级污染物,为半导体和光学等先进行业提供了一种轻便、可扩展且经济高效的替代方案。
该团队的研究成果发表在《小型结构》杂志上,强调了磁性软机器人革新精密制造业的潜力。研究人员由韩国科学技术院(KAIST)的SanhaKim教授和汉阳大学的JeongJae(JJ)Wie教授领导。
在度半导体的生产中,实现金属层的超低表面粗糙度对于器件性能至关重要。即使是微小的瑕疵也会导致缺陷,从而降低电子元件的效率和可靠性。
此外,确保制造过程中表面无污染物对于避免引入可能损害设备功能的颗粒至关重要。为了满足这些严格的要求,超精密抛光和清洁技术已成为半导体制造中的关键组成部分。
传统方法,例如化学机械平坦化(CMP)和CMP后清洁系统,一直是表面平坦化和污染物去除的行业标准。然而,这些系统存在重大缺陷。CMP设备不仅庞大而复杂,而且极其昂贵,难以扩展或升级。
此外,这些工艺中使用的耗材(例如抛光垫、研磨浆和清洁刷)价格昂贵,需要频繁更换,从而增加了运营费用。高昂的前期成本和持续的维护要求,对旨在降低生产成本并提高产量的制造商来说是一个重大挑战。
为了应对这些挑战,研究团队开发了“旋转机器人”,这是一种由外部磁场驱动的微型机器人,可进行超精密表面抛光和清洁。旋转机器人由热塑性聚氨酯-Fe3O4纳米复合材料制成,由磁力搅拌器控制,产生旋转磁场。
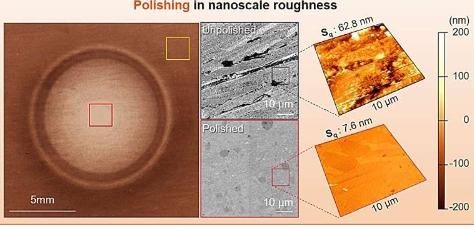
这种装置虽然比传统设备小得多、简单得多,但能够让旋转机器人在表面上自主旋转和枢转,在去除纳米级污染物时可实现99.6%的出色清洁效率。除了清洁能力之外,这些机器人还可以将表面打磨到惊人的光滑度,达到平均粗糙度(Ra)1.8纳米的粗糙度水平。
这项技术真正具有突破性的是它能够同时操作多个旋转机器人。多达42个旋转机器人在三个垂直堆叠的晶圆上协同工作,为表面工程提供了前所未有的可扩展性和效率。尽管规模很小,但旋转机器人系统比传统的抛光工具轻1,000倍,但可提供相当甚至更好的结果。
此外,旋转机器人能够进行三体磨蚀抛光。在此过程中,旋转机器人和被抛光表面之间会捕获坚硬的二氧化硅颗粒,以纳米级精度逐渐去除材料。这种方法可产生镜面般光滑的表面,可与离子束抛光和磁流变抛光等最先进的技术相媲美,但成本和设备尺寸仅为后者的一小部分。
通过多个Spinbot操作实现多层工艺的可扩展性。图片来源:H.Je等人,《小型结构》(2024年)。DOI:10.1002/sstr.202400245
旋转机器人技术的一个关键优势是其可持续性。传统的抛光和清洁方法需要大量能源,并且经常使用危险化学品。相比之下,旋转机器人由磁场驱动,无需使用此类化学品,减少了对环境的影响。此外,机器人可重复使用,进一步增强了该技术的可持续性。
研究团队设想未来将旋转机器人技术集成到自动化生产系统中,以更低的成本和最小的环境影响提供超精密制造能力。这一突破代表着向自主制造迈出了重要一步,这些微型机器人可用于从半导体到光学等各种应用。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【关羽骑赤兔包公铡太师打一生肖】在中国传统文化中,历史人物、典故与生肖文化常常交织在一起,形成许多有趣...浏览全文>>
-
【关羽连招技巧】在《王者荣耀》中,关羽是一位非常具有操作性的英雄,拥有高机动性和强大的控制能力。掌握他...浏览全文>>
-
【关羽历史上是怎么死的】关羽,字云长,是三国时期蜀汉的重要将领,以忠义、勇猛著称。他在《三国演义》中被...浏览全文>>
-
【关羽和刘备的马分别叫什么】在中国古代历史与文学作品中,三国时期的人物形象深入人心,尤其是关羽、刘备等...浏览全文>>
-
【关羽的媳妇】在历史与文学的交汇中,关羽作为三国时期的重要人物,其形象深入人心。然而,关于他的家庭生活...浏览全文>>
-
【关羽的青龙偃月刀现在在哪里】在中国古代历史和文学中,关羽是一位极具传奇色彩的人物,他所使用的“青龙偃...浏览全文>>
-
【关羽的青龙偃月刀多重】在中国古代文学和民间传说中,关羽是一位极具传奇色彩的英雄人物,他的形象不仅体现...浏览全文>>
-
【关于中秋节的英语手抄报】中秋节是中国传统节日之一,每年农历八月十五庆祝。它不仅是家人团聚的日子,也是...浏览全文>>
-
【关于中秋节的小故事】中秋节是中国传统节日之一,承载着丰富的文化内涵和深厚的情感寄托。自古以来,人们在...浏览全文>>
-
【关于中秋节的文化含义】中秋节,是中国传统节日中最具代表性的节日之一,通常在农历八月十五这一天庆祝。它...浏览全文>>