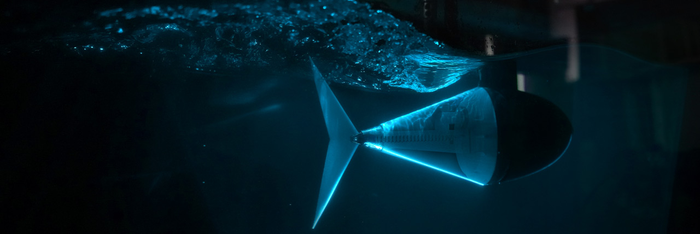
机器鱼尾和优雅的数学比例可以为下一代水下无人机的设计提供信息
水下车辆通常设计用于一种巡航速度,而在其他速度下通常效率低下。与鱼游得好、快或慢的方式相比,该技术还处于初级阶段。
如果您希望您的水下航行器快速穿越数英里的海洋,然后减速以绘制狭窄的珊瑚礁,或加速到漏油地点然后节流阀进行仔细测量,该怎么办?
弗吉尼亚大学工程与应用科学学院助理教授Dan Quinn和他的同事,最近获得 UVA 博士学位。研究生和博士后研究员钟强发现了实现此类多速任务的关键策略。他们展示了一种在机器人中实施这一策略的简单方法,最终可以为水下航行器设计提供信息。他们的工作最近发表在《科学机器人》上。
在设计游泳机器人时,研究人员不断提出的一个问题是推动机器人在水中前进的部件应该有多硬。这是一个很难的问题,因为在某些情况下运行良好的相同刚度在其他情况下可能会失败。
“有一个尾部刚度就像在自行车上有一个齿轮比,”奎因说,他在机械和航空航天工程以及电气和计算机工程方面拥有联合任命。“你只能以一种速度高效。这就像用固定齿轮自行车在旧金山骑自行车一样;走几个街区你就会筋疲力尽。”
鱼很可能通过实时调整它们的刚度来解决这个问题:它们根据情况调整不同的刚度级别。
问题是,没有已知的方法来测量游泳鱼的刚度,因此很难知道鱼是否以及如何做到这一点。Quinn 和 Zhong 通过结合流体动力学和生物力学来推导出一个模型来说明如何以及为什么应该调整尾部刚度,从而解决了这个问题。
“令人惊讶的是,”奎因说,“从所有的数学计算中得出一个简单的结果:游泳速度的平方会增加硬度。
“为了测试我们的理论,我们建造了一个鱼形机器人,它使用可编程的人造肌腱在水道中游泳时调整自己的尾巴刚度。发生的事情是,突然间,我们的机器人可以在更宽的速度范围内游泳,同时使用的能量几乎是具有固定刚度尾巴的同一机器人的一半。进步真的非常显着。”
“我们的工作是第一个结合生物力学、流体动力学和机器人技术来综合研究尾巴刚度的工作,这有助于揭开尾巴刚度如何影响游泳表现的长期存在的谜团,”钟说。“更奇妙的是,我们不仅专注于理论分析,还专注于提出可调刚度的实用指南。我们提出的可调刚度策略已被证明在现实的游泳任务中是有效的,其中机器鱼同时实现了高速和高效率的游泳。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【广西南宁三甲医院列表有哪些】在广西南宁市,三甲医院作为医疗资源的重要组成部分,承担着区域内的疑难重症...浏览全文>>
-
【广西南宁建设学校】“广西南宁建设学校”是一所位于广西壮族自治区南宁市的教育机构,专注于建筑类及相关工...浏览全文>>
-
【广西哪里有机场】广西作为中国重要的旅游和交通枢纽省份,拥有多个机场,方便旅客出行。无论是前往南宁、桂...浏览全文>>
-
【广西名酒排名】广西作为中国西南地区的重要省份,不仅自然风光秀美,其酿酒文化也源远流长。虽然广西不像四...浏览全文>>
-
【广西民族大学专业】广西民族大学是一所具有鲜明民族特色和多学科协调发展的综合性大学,坐落于广西南宁市。...浏览全文>>
-
【广西米浆的制作方法】广西米浆是一种传统的米制品,常见于广西各地的早餐或小吃中,口感细腻、香滑可口,是...浏览全文>>
-
【广西美女最多的城市推荐】在广西这片美丽的土地上,不仅有壮丽的自然风光和丰富的民族文化,还孕育了许多气...浏览全文>>
-
【广西麻将怎么打】广西麻将是一种流行于广西地区的传统麻将玩法,其规则与常见的四川麻将、广东麻将等有所不...浏览全文>>
-
【广发银行和工商银行一样吗】广发银行和中国工商银行(简称“工行”)都是我国重要的商业银行,但它们在性质...浏览全文>>
-
【广发银行贷款条件】广发银行作为国内知名的商业银行之一,提供多种贷款产品,以满足不同客户的资金需求。无...浏览全文>>