加州理工学院、苏黎世联邦理工学院和哈佛的工程师正在开发一种人工智能 (AI),它可以让自主无人机利用洋流来帮助导航,而不是在洋流中挣扎。
“当我们希望机器人探索深海时,尤其是成群结队的探索时,几乎不可能在海面 20,000 英尺外用操纵杆控制它们。我们也无法向它们提供有关它们需要导航的当地洋流的数据,因为我们无法从表面检测到它们。相反,在某个时刻,我们需要海上无人机来决定如何自行移动,”John O. Dabiri(MS '03,PhD '05)说,航空和机械工程百年纪念教授,12 月 8 日自然通讯发表的一篇关于该研究的论文的通讯作者。
人工智能的性能通过计算机模拟进行了测试,但这项工作背后的团队还开发了一个手掌大小的小型机器人,该机器人在微型计算机芯片上运行算法,该芯片可以为地球和其他行星上的海上无人机提供动力。目标是创建一个自主系统来监测地球海洋的状况,例如将该算法与他们之前开发的假肢结合使用,以帮助水母更快地游泳并按照指令进行。运行该算法的全机械机器人甚至可以探索其他世界的海洋,例如土卫二或木卫二。
在任何一种情况下,无人机都需要能够自己决定去哪里以及到达那里的最有效方式。为此,他们可能只有自己可以收集的数据——关于他们目前正在经历的水流的信息。
为了应对这一挑战,研究人员转向了强化学习 (RL) 网络。与传统的神经网络相比,强化学习网络不会在静态数据集上训练,而是尽可能快地训练,以收集经验。这个方案允许它们存在于更小的计算机上——为了这个项目的目的,团队编写了可以安装和运行的软件——一个 2.4 x 0.7 英寸的微控制器,任何人都可以以低于 30 美元的价格购买亚马逊并且只使用大约半瓦的功率。
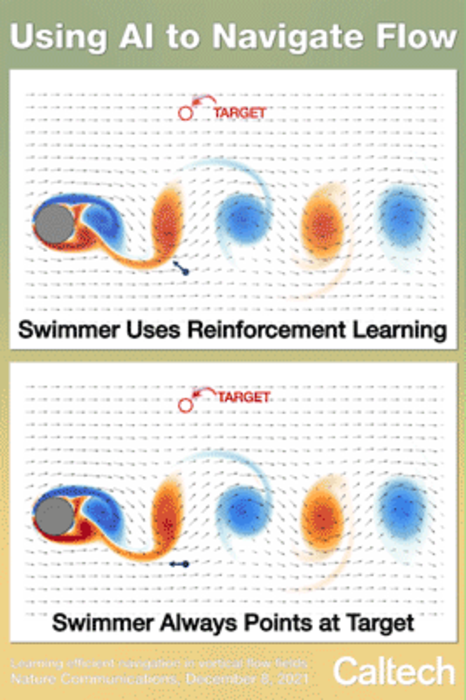
使用计算机模拟,其中流过水中的障碍物会产生几个向相反方向移动的涡流,该团队教人工智能以这样一种方式导航,即利用涡流后的低速区域滑行到使用最小功率的目标位置。为了帮助其导航,模拟游泳者只能获得有关其附近水流的信息,但它很快就学会了如何利用涡流向所需目标滑行。在物理机器人中,人工智能同样只能访问可以从机载陀螺仪和加速度计收集的信息,这些都是用于机器人平台的相对较小且成本较低的传感器。
标签:
免责声明:本文由用户上传,如有侵权请联系删除!