哈尔滨工业大学的一个研究团队提出了一种新型有效的超声引导前列腺经皮介入机器人系统。8关节机器人系统可实现前列腺插入的全自动控制,可潜在应用于活检、近距离放射治疗等前列腺诊断和治疗。这项研究发表在2022 年 1 月 27 日的《机械工程前沿》杂志上。
随着近年来前列腺疾病患者群体的大幅增加,新型刚性机器人系统为自动化干预过程提供了一种有希望的替代方案,其尝试和创伤更少,对操作者经验的依赖也更少。
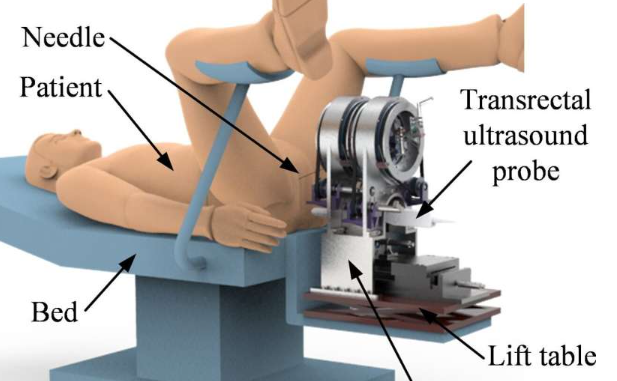
“紧凑的系统利用有限的空间进行前列腺插入操作。机器人系统包含 8 个关节,用于独立控制超声探头操作、进针定位和进针。采用平行结构,重要的是,可以避免结构和进针之间的潜在碰撞。病人,”该研究的作者潘波助理教授说。
Profs的研究小组。傅伊力和潘博是中国研究医学影像引导手术机器人系统的先驱课题组之一。机器人系统旨在满足手术过程中的复杂要求并提高成功率。“应用智能系统辅助医生实现手术难度降低,是改善我们就医过程的有效途径,”潘说。而这一次,研究小组专注于超声引导的前列腺插入过程。
超声引导的前列腺插入是诊断和治疗前列腺疾病的常用方法。在插入过程中,医生需要同时扫描腺体,插入针头并检查准确性。一台平板电脑可以帮助医生降低手术难度;但是,它限制了插入的灵活性。此外,通常需要重复尝试以提高准确性,这会给患者带来更大的创伤和不适。在这项工作中提出的 8 关节机器人系统旨在实现整个过程的自动化。
“具有挑战性的一点是,该系统应该包含所有需要的功能,设计紧凑而坚固,”潘解释说。新设计的系统可容纳超声探头和插入针。可操纵经直肠超声探头插入和旋转进行前列腺扫描;针头可定向定位调整姿势,并根据操作者的指令自动插入。所有动作都是独立的,以实现高反射性。该设计还考虑了医疗机器人设计的一般要求,例如自锁和易于消毒。
标签:
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!