首页 >> 资讯 >
计算机科学家开发出受人眼启发的新型改进型相机
由马里兰大学计算机科学家领导的团队发明了一种摄像装置,可以改善机器人观察周围世界和做出反应的方式。他们的创新摄像系统受到人眼工作原理的启发,模仿眼睛微小的不自主运动,以保持长时间清晰稳定的视力。
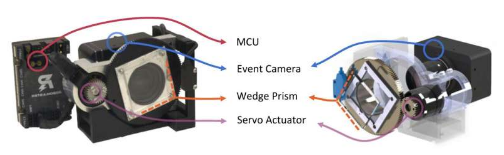
该团队对该相机(称为人工微扫视增强事件相机(AMI-EV))的原型设计和测试在《科学机器人》杂志上发表的一篇论文中进行了详细介绍。
“事件摄像机是一种相对较新的技术,比传统摄像机更善于追踪移动物体,但当涉及大量运动时,当今的事件摄像机很难捕捉到清晰、无模糊的图像,”该论文的第一作者、马里兰大学计算机科学博士生何波涛说道。
“这是一个大问题,因为机器人和许多其他技术(例如自动驾驶汽车)都依赖准确及时的图像来对不断变化的环境做出正确反应。因此,我们问自己:人类和动物如何确保他们的视线始终集中在移动的物体上?”
对于何教授的团队来说,答案是微扫视,即当人们试图集中视线时不由自主发生的微小而快速的眼球运动。通过这些微小而连续的运动,人眼可以长时间准确地聚焦于物体及其视觉纹理(例如颜色、深度和阴影)。
何立表示:“我们认为,就像我们的眼睛需要微小的运动来保持聚焦一样,相机可以使用类似的原理来捕捉清晰准确的图像,而不会因运动而产生模糊。”
该团队通过在 AMI-EV 内插入旋转棱镜来重定向镜头捕捉的光束,成功复制了微扫视。棱镜的连续旋转运动模拟了人眼中自然发生的运动,使相机能够像人一样稳定记录物体的纹理。然后,该团队开发了软件来补偿棱镜在 AMI-EV 内的移动,以巩固来自移动光线的稳定图像。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
分享:
相关阅读
最新文章
-
【关于中秋节的英语手抄报】中秋节是中国传统节日之一,每年农历八月十五庆祝。它不仅是家人团聚的日子,也是...浏览全文>>
-
【关于中秋节的小故事】中秋节是中国传统节日之一,承载着丰富的文化内涵和深厚的情感寄托。自古以来,人们在...浏览全文>>
-
【关于中秋节的文化含义】中秋节,是中国传统节日中最具代表性的节日之一,通常在农历八月十五这一天庆祝。它...浏览全文>>
-
【关于中秋节的手抄报内容】中秋节是中国传统节日之一,象征着团圆与丰收。为了帮助同学们更好地了解中秋节的...浏览全文>>
-
【关于中秋节的诗句古诗】中秋节是中国传统节日之一,自古以来便有赏月、吃月饼、家人团聚的习俗。在众多文人...浏览全文>>
-
【关于中秋节的诗歌】中秋节是中国传统节日之一,自古以来就深受文人墨客的喜爱。许多诗人以中秋为题材,创作...浏览全文>>
-
【关于中秋节的诗词精选】中秋节,是中国传统节日中最具诗意的节日之一。自古以来,文人墨客常以中秋为题,写...浏览全文>>
-
【关于中秋节的来历100字】中秋节,又称月圆节,是中国传统节日之一,时间为农历八月十五。其起源与古代对月亮...浏览全文>>
-
【关于中秋节的句子】中秋节是中国传统节日之一,象征着团圆、思念与丰收。自古以来,文人墨客常用诗句表达对...浏览全文>>
-
【关于张起灵身世年龄介绍】在《盗墓笔记》系列小说中,张起灵是一个神秘而重要的角色,他的身世和年龄一直是...浏览全文>>
大家爱看
频道推荐