近年来,材料科学家和工程师为机器人和假肢应用引入了越来越复杂的材料。这包括各种电子皮肤,旨在感知周围环境并人工再现触觉。
清华大学的研究人员最近推出了一种新型双模式触觉电子皮肤,它可以增强机器人的传感能力,同时还允许它们利用人类用户的触觉来交流信息。这种电子皮肤发表在预印本服务器arXiv上的一篇论文中,并被IEEE ICRA 2024接受,它既可以感知触觉信息,也可以产生触觉反馈,从而实现基于触摸的双向人机交互 (HRI)。
“我们的论文提出了一种双模式电子皮肤(e-skin),旨在增强人机交互(HRI),”论文合著者丁文波博士告诉 Tech Xplore。“它解决了当前电子皮肤技术的局限性,只能提供触觉 感知或触觉 反馈,但不能两者兼而有之。传感和反馈单元的工作机制无法无缝结合,导致设备体积更大,制造成本更高。”
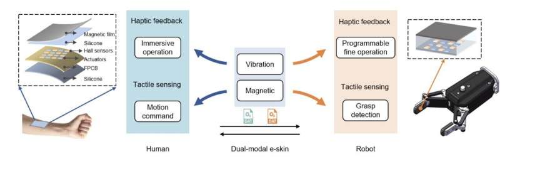
丁博士和他的同事最近研究的主要目标是开发一种双模式电子皮肤,它也可以通过触觉信息的双向传输对接触力做出反应。为了实现这一目标,他们推出的电子皮肤集成了多模态磁性触觉传感和振动反馈。
“电子皮肤集成了柔性磁性薄膜、硅弹性体、霍尔传感器阵列、执行器阵列和微控制器单元,”丁博士解释道。“霍尔传感器检测机械压力引起的磁膜变形,从而导致磁场变化,从而实现多维触觉感知。同时,执行器阵列产生机械振动,提供触觉反馈,增强交互体验人类与机器人之间。”
标签:
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!