受大自然启发的机械手
华盛顿,2021 年 12 月 21 日——如果传统机器人的机械手不像象鼻、章鱼触手或人类手指那样灵活,那么它们可能难以抓住和操纵柔软的物体。
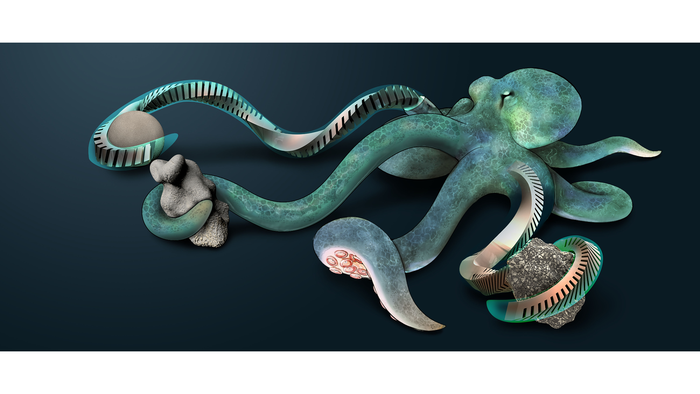
在 AIP Publishing 的 Applied Physics Reviews 中,中国上海交通大学的研究人员开发了一种受这些生物系统启发的多段软机械手。软机械手基于气动网,这是气动驱动的弹性结构。
这些结构呈触手状,由一系列相互连接的内部腔室组成,这些腔室可以通过气动充气,像气球一样吹起来。触手的一侧非常灵活,而另一侧则更硬。增加腔室的气压会导致结构向坚硬的一侧弯曲。
“我们使用可以遵循特定 3D 空间轨迹的数学模型设计了软机械手,”作者 Dong Wang 说。“我们的软机械手由多个部分组成,其中每个部分通过选择不同的腔室方向,显示出不同的驱动模式——扭曲、平面内弯曲或螺旋驱动。
“这项工作的关键进步是开发了一种数学方法,可以在单次加压时自动设计匹配复杂 3D 轨迹的软机械手。”
该小组通过改变气动网结构的几何、材料和加载参数,为各种 3D 轨迹设计了操纵器。他们能够进行逆向设计以创建一个遵循特定轨迹的操纵器。
该设计方法依赖于比传统计算模型使用成本低得多的数学模型。该小组证实他们的数学技术产生了行为类似于计算模型的操纵器设计。他们使用简单的实验验证了他们的结果。
“要实现所设计的软机械手的真正多功能应用,还需要做更多的工作,”作者顾国英说。
未来的工作包括将方法扩展到具有多个执行器的系统的策略。此外,逆向设计过程仍然不是全自动的,因为该过程的第一阶段需要人工操作员选择分配给扭曲、弯曲或螺旋变形的曲线区域。
“我们可以设想一个自动化系统使用机器学习或其他方法来完成这一步,”顾说。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【关羽骑赤兔包公铡太师打一生肖】在中国传统文化中,历史人物、典故与生肖文化常常交织在一起,形成许多有趣...浏览全文>>
-
【关羽连招技巧】在《王者荣耀》中,关羽是一位非常具有操作性的英雄,拥有高机动性和强大的控制能力。掌握他...浏览全文>>
-
【关羽历史上是怎么死的】关羽,字云长,是三国时期蜀汉的重要将领,以忠义、勇猛著称。他在《三国演义》中被...浏览全文>>
-
【关羽和刘备的马分别叫什么】在中国古代历史与文学作品中,三国时期的人物形象深入人心,尤其是关羽、刘备等...浏览全文>>
-
【关羽的媳妇】在历史与文学的交汇中,关羽作为三国时期的重要人物,其形象深入人心。然而,关于他的家庭生活...浏览全文>>
-
【关羽的青龙偃月刀现在在哪里】在中国古代历史和文学中,关羽是一位极具传奇色彩的人物,他所使用的“青龙偃...浏览全文>>
-
【关羽的青龙偃月刀多重】在中国古代文学和民间传说中,关羽是一位极具传奇色彩的英雄人物,他的形象不仅体现...浏览全文>>
-
【关于中秋节的英语手抄报】中秋节是中国传统节日之一,每年农历八月十五庆祝。它不仅是家人团聚的日子,也是...浏览全文>>
-
【关于中秋节的小故事】中秋节是中国传统节日之一,承载着丰富的文化内涵和深厚的情感寄托。自古以来,人们在...浏览全文>>
-
【关于中秋节的文化含义】中秋节,是中国传统节日中最具代表性的节日之一,通常在农历八月十五这一天庆祝。它...浏览全文>>