从清理溢出物到提供食物,机器人正在被教导执行日益复杂的家务劳动。许多这样的家庭机器人学员都是通过模仿来学习的。它们被编程为复制人类引导它们完成的动作。
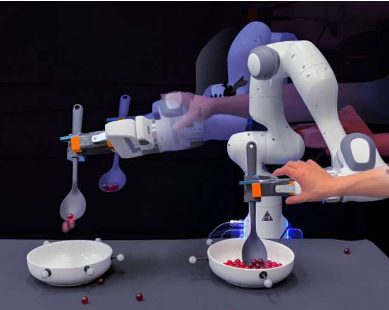
事实证明,机器人具有出色的模仿能力。但除非工程师也对它们进行编程以适应每一种可能的碰撞和推动,否则机器人不一定知道如何处理这些情况,除非从顶部开始执行任务。
现在,麻省理工学院的工程师们的目标是让机器人在面临偏离训练路径的情况时掌握一些常识。他们开发了一种方法,将机器人运动数据与大型语言模型(LLM)的“常识知识”联系起来。
他们的方法使机器人能够在逻辑上将许多给定的家务任务解析为子任务,并根据子任务中的中断进行物理调整,以便机器人可以继续前进,而无需返回并从头开始执行任务,并且工程师无需显式编程修复整个过程中所有可能的故障。
“模仿学习是实现家用机器人的主流方法。但是,如果机器人盲目模仿人类的运动轨迹,微小的错误就会积累起来,最终使其余的执行脱轨。”麻省理工学院电气工程系研究生王彦伟说和计算机科学(EECS)。“通过我们的方法,机器人可以自我纠正执行错误并提高整体任务的成功率。”
Wang 和他的同事将在 5 月份的国际学习表征会议 (ICLR 2024)上展示一项研究,详细介绍了他们的新方法。该研究的共同作者包括 EECS 研究生 Tsun-Hsuan Wang 和 Jiayuan Mao、麻省理工学院航空航天系 (AeroAstro) 博士后 Michael Hagenow 以及麻省理工学院航空航天系 HN Slater 教授 Julie Shah。
标签:
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!